Contents
EOL distros:
Melodic |
|
|
Interface for using ROS with the Gazebo simulator.
- Maintainer status: developed
Maintainer\Support: Abdussalam Alajami <Abdussalam.alajami@upf.edu>
- Developers from UBICALAB, Pompeu Fabra Universitat:
Abdussalam Alajami <Abdussalam.alajami@upf.edu>, Guillem Moreno <guillem.moreno01@estudiant.upf.edu>, Dr.Rafael Pous <rafael.pous@upf.edu>.
Source: git https://github.com/Abdu-lybot/RFID_Sensor_Plugin_gazebo.git (branch: master --> Tested on turtlebot, branch uav_tested --> tested with iris drone).
RFID System Gazebo Plugin
RFID System Gazebo Plugin A design of a ROS Gazebo RFID system plugin that enables the simulation of the RFID readers-antennas mounted on robots reading RFID tags in the environment. The plugin is based on a model based on probability of detection which simulates the behavior of the complete RFID system, comprised of readers, antennas, and tags, in the Gazebo simulation platform. It consists of a set of ROS packages that provide the necessary interfaces to simulate the functionality of an RFID antenna and an RFID tag in the Gazebo 3D rigid body simulator for robots. It integrates with ROS using ROS messages, services, and transforms.
These plugins are designed to be able to adapt and be used with any robot simulated in the gazebo by including the models and plugins adequately in the robot SDF/Xacro file.
This page will provide you with the necessary steps to run the plugin on your system.
IMPORTANT: Please install dependencies required for gazebo 9 and iris drone for the simulation to be able to work.
RFID Antenna Sensor Gazebo Plugin
Overview
The first plugin/package (RFID_antenna_plugin): Simulates the behavior of an RFID reader/antenna. The plugin is a ros package that can be simply compiled using catkin_make or catkin build. In real life, RFID antennas perform two very important functions. First, they transmit power to the RFID tags to activate them. Second, they receive data back from the activated tags. A single antenna can activate and receive data from multiple tags simultaneously.
Similarly, in simulation, the antenna/reader diptera_antenna plugin will be able to detect tags using a probability model considering in a simplified manner the effect of the environment on the detection of the tag. The telecommunication parameters that govern the probability of detection are:
Params
NOTE: These parameters could be changed in the SDF/Xacro file while adding the plugin.
<Antenna_name>: A parameter that sets the name of the antenna.
<tag_name>: A parameter that sets the name of the tag.
<detected_tag_name>: A parameter that sets the name of the detected tag.
<detected_tag_colour>: A parameter that sets the color of the detected tag.
<Antenna_id>: A parameter that gives the antenna a unique id. This parameter is able the reuse the same plugin by adding multiple antennas in the simulation Each antenna with a different id will function independently from the others.
<azimuth_beamwidth>: Beamwidth is the angle from which the majority of the antenna's power, as illustrated on the radiation pattern's main lobe radiates. It may be measured in the horizontal or vertical planes and is the distance between two points where the power is less than half of the maximum.

- This parameter represents the azimuth beam-width of the antenna.
<elevation_beamwidth>: This parameter represents the elevation beam-width of the antenna.
<rzero>: R0 is a parameter that represents the distance at which the probability distribution function = 0.5.
<tag_yellow_sdf_path>: A parameter that sets the SDF model path of the yellow tags to be spawned.
<tag_red_sdf_path>: A parameter that sets the SDF model path of the red tags to be spawned.
<tag_blue_sdf_path>: A parameter that sets the SDF model path of the blue tags to be spawned.
<tag_purple_sdf_path>: A parameter that sets the SDF model path of the purple tags to be spawned.
TF
In order for the plugin to work the antenna frame and relative pose in ROS must be set correctly in the gazebo_to_ros_tf package launch file.
1 <launch>
2
3 <node pkg="gazebo_to_ros_tf"
4 name="world_to_ros"
5 type="world_to_ros.py" output="screen">
6 </node>
7 <node pkg="tf"
8 type="static_transform_publisher"
9 name="map_to_odom_publisher"
10 args="0 0 0 0 0 0 map odom_sim 100" />
11 <node pkg="tf"
12 type="static_transform_publisher"
13 name="base_link_to_antenna_publisher"
14 args="0.12 0 -0.11 0 0 0 base_link_sim antenna_1 100" />
However, if you would like to use more then one RFID antenna/reader attached to the same robot an example would be like this:
1 <launch>
2
3 <node pkg="gazebo_to_ros_tf"
4 name="world_to_ros"
5 type="world_to_ros.py" output="screen">
6 </node>
7 <node pkg="tf"
8 type="static_transform_publisher"
9 name="map1_to_odom_publisher"
10 args="0 0 0 0 0 0 map odom_sim 100" />
11 <node pkg="tf"
12 type="static_transform_publisher"
13 name="base_link_to_antenna_publisher1"
14 args="0.12 0 -0.11 0 0 0 base_link_sim antenna_1 100" />
15 <node pkg="tf"
16 type="static_transform_publisher"
17 name="base_link_to_antenna_publisher2"
18 args="-0.12 0 -0.11 3.14 0 0 base_link_sim antenna_2 100" />
19 <node pkg="tf"
20 type="static_transform_publisher"
21 name="base_link_to_antenna_publisher3"
22 args="0 0.12 -0.11 1.57 0 0 base_link_sim antenna_3 100" />
23 <node pkg="tf"
24 type="static_transform_publisher"
25 name="base_link_to_antenna_publisher4"
26 args="0 -0.12 -0.11 -1.57 0 0 base_link_sim antenna_4 100" />
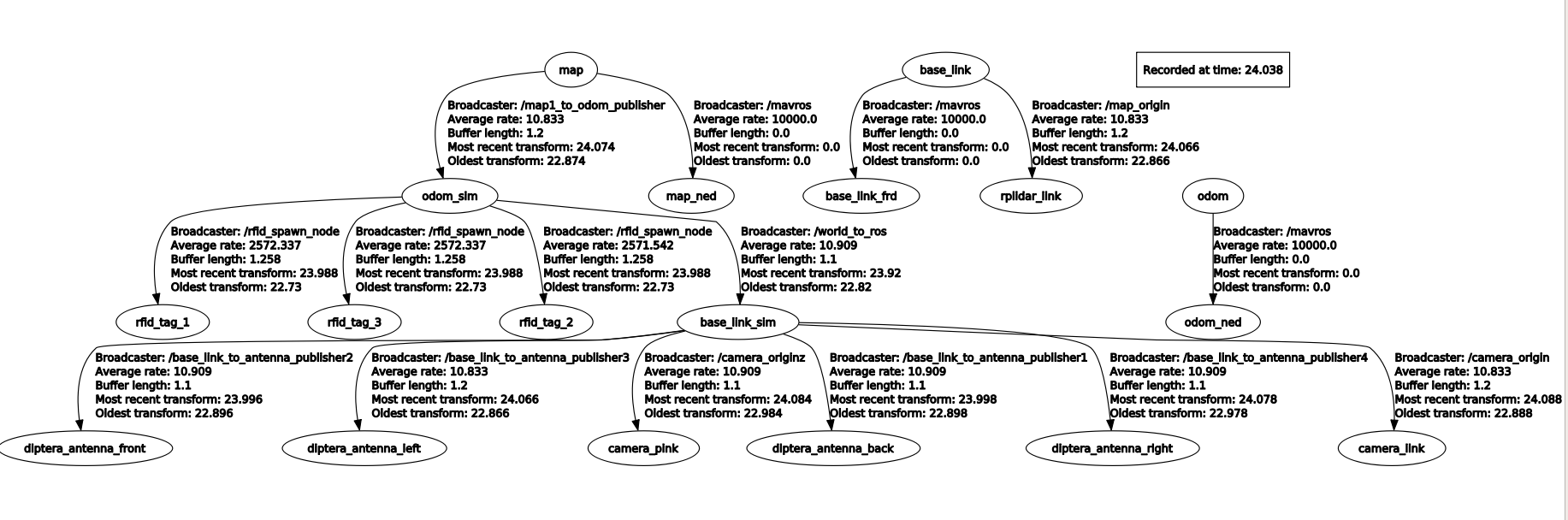
Shows that 4 antenna frames are connected to the base_link_sim frame which represents the robot frame. An example video of 4 antennas connected to an aerial robot is shown at the end of this page.
assign the relative position/pose of the antenna carefully with the robot, it should be set the same way the antenna model is positioned in the gazebo
Admonitions should be used with care. A page riddled with admonitions will look restless and will be harder to follow than a page where admonitions are used sparingly.
RFID Tag Sensor Gazebo Plugin
Overview
The second plugin (RFID_tag_plugin): Contains the plugin that simulates RFID tags that are usually attached to a product/box called a "fixture" This plugin/package is compiled using catkin_make or catkin build. In real life, RFID Tags are small objects that contain a small antenna. Similarly, in simulation, the plugin does two major tasks. First, it reads a file called map.txt which exists in the plugin folder that contains in each line information of the fixtures (boxes that contain tags) in this order: #fix_name id x y z, which are the fixture name, id, and coordinates according to the world map.
- Secondly, it will spawn a pre-set number of tags in each box in gazebo. The parameters that could be changed in this plugin are:
Params
NOTE: These parameters could be changed in the SDF/Xacro file while adding the plugin.
<tag_name>: A parameter that sets the name of the tag.
<tags_per_fix>: which sets the number of tags spawned in each box/fixture.
<parent_frame>: A parameter that sets the world/robot frame you desire the tag frames to be attached to.
<fix_sdf_path>: A parameter that sets the SDF model path of the box or fixtures to be spawned.
<tag_sdf_path>: A parameter that sets the SDF model path of the tags to be spawned.
TF
Unlike the antenna plugin, no further adjustments are needed as the plugin will generate a frame for each tag with a relative pose. The below image shows the transform tree of 3 tags:
{kind=link}
HOW TO USE?
First Step
Setting up your ROS source folder: Clone the packages gazebo_to_ros_tf gazebo & RFID_antenna_plugin & RFID_tag_plugin to your source folder catkin_ws/src
1 git clone https://github.com/Abdu-lybot/RFID_Sensor_Plugin_gazebo.git
Second Step
Compile your workspace: From the location of your workspace folder catkin_ws
1 catkin_make
Third Step
Adding to your bashrc the path of your plugin:
Fourth Step
add the RFID_antenna & RFID_tag plugins to your robot model Xacro/SDF file or any other: For adding the plugins: Adding the Plugin to your model:
1 !--for the RFID_tags plugin:-->
2 <gazebo reference="base_link">
3 <sensor type="rfid" name="rfid_tags">
4 <plugin name="rfid_tags" filename="libRFID_tag_plugin.so">
5 <tag_name>rfid_tag</tag_name>
6 <parent_frame>odom_sim</parent_frame>
7 <tags_per_fix>5</tags_per_fix>
8 <fix_sdf_path>/home/<USER>/catkin_ws/src/RFID_antenna_plugin/Models/normal_size_fixture/model.sdf</fix_sdf_path>
9 <tag_sdf_path>/home/<USER>/catkin_ws/src/RFID_antenna_plugin/Models/RFID_1/model.sdf</tag_sdf_path>
10 </plugin>
11 </sensor>
12 </gazebo>
For the RFID_antenna plugin: Adding the Plugin and the Graphical Antenna Model to Gazebo:
1 <!--______________Antenna_1 Graphical Model to Xacro file_______________-->
2 <link name="antenna_1_link">
3 <visual>
4 <origin xyz="0 0.00 0" rpy="0 0 0"/>
5 <geometry>
6 <mesh filename="package://Models/antenna_1/meshes/antenna1.stl" scale="1 1 1"/>
7 </geometry>
8 <material name="light_black"/>
9 </visual>
10 <collision>
11 <origin xyz="0 0.00 0.000" rpy="0 0 0"/>
12 <geometry>
13 <box size="0.140 0.140 0.143"/>
14 </geometry>
15 </collision>
16 <inertial>
17 <origin xyz="0 0 0" rpy="0 0 0"/>
18 <mass value="0.2573504e-01"/>
19 <inertia ixx="2.2124416e-03" ixy="-1.2294101e-05" ixz="3.4938785e-05"
20 iyy="2.1193702e-03" iyz="-5.0120904e-06"
21 izz="2.0064271e-03" />
22 </inertial>
23 </link>
24 <!--______________Antenna_1 Plugin to Xacro file_______________-->
25 <gazebo reference="base_link">
26 <sensor type="rfid" name="rfid_antenna">
27 <plugin name="rfid_antenna" filename="libRFID_antenna_plugin.so">
28 <antenna_name>antenna_</antenna_name>
29 <tag_name>rfid_tag</tag_name>
30 <detected_tag_name>rfid_tag_</detected_tag_name>
31 <detected_tag_colour>blue</detected_tag_colour>
32 <antenna_id>1</antenna_id>
33 <azimuth_beamwidth>1</azimuth_beamwidth>
34 <elevation_beamwidth>1</elevation_beamwidth>
35 <rzero>2</rzero>
36 <tag_yellow_sdf_path>/home/<USER>/catkin_ws/src/RFID_antenna_plugin/Models/RFID_3/model.sdf</tag_yellow_sdf_path>
37 <tag_red_sdf_path>/home/<USER>/catkin_ws/src/RFID_antenna_plugin/Models/RFID_2/model.sdf</tag_red_sdf_path>
38 <tag_blue_sdf_path>/home/<USER>/catkin_ws/src/RFID_antenna_plugin/Models/RFID_5/model.sdf</tag_blue_sdf_path>
39 <tag_purple_sdf_path>/home/<USER>/catkin_ws/src/RFID_antenna_plugin/Models/RFID_4/model.sdf</tag_purple_sdf_path>
40 </plugin>
41 </sensor>
42 </gazebo>
Published topics-msgs
</detected_tags >: The detected tags information will be published in this topic with the message PoseStamped geometric messages. This message contains:
<frame_id>: this parameter contains the name and id of the detected tag.
<stamp>: Contains the time stamp of when it was detected.
<position.x>: Contains the position of the detected tag relative to x-axis of the world.
<position.y>: Contains the position of the detected tag relative to y-axis of the world.
<position.z>: Contains the position of the detected tag relative to z-axis of the world.
Finnaly
Run your gazebo simulation, then run the tf tree node:
1 roslaunch gazebo_to_ros_tf gazebo_to_ros_tf.launch
Video Example
A video of a UAV equipped with 4 RFID antennas in an environment containing 1000 RFID tags, while only having the attached antenna facing the right side of the UAV active. target="UAV equipped with 4 RFID antennas in an environment of 1000 RFID tags"