Only released in EOL distros:
wu_ros_tools: easy_markers | generic_dashboard | manifest_cleaner | rosbaglive | roswiki_node | rxgraphplus
Package Summary
Documented
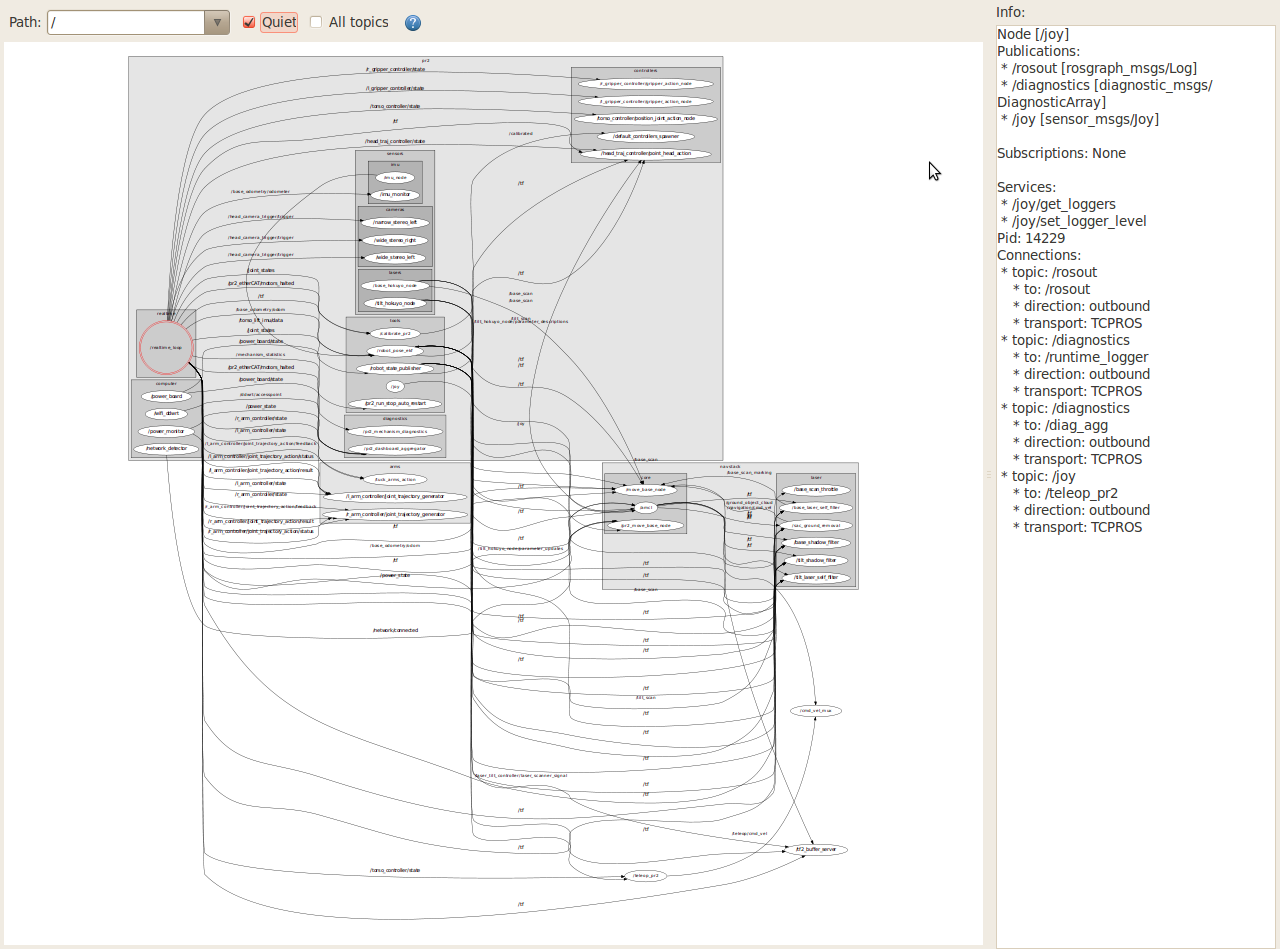
rxgraph is a command-line tool for visualizing a ROS computation graph. The rxgraph is a new package in ROS 1.1 that provides an updated version of the rxgraph tool that was originally distributed in the rosgraph package. This forked version allows for grouping nodes into clusters.
- Author: Ken Conley and David V. Lu!!
- License: BSD
- Source: svn https://wu-robotics.googlecode.com/svn/branches/stable/wu_ros_tools
Contents
Rxgraph+
rxgraph + hierachical clustering
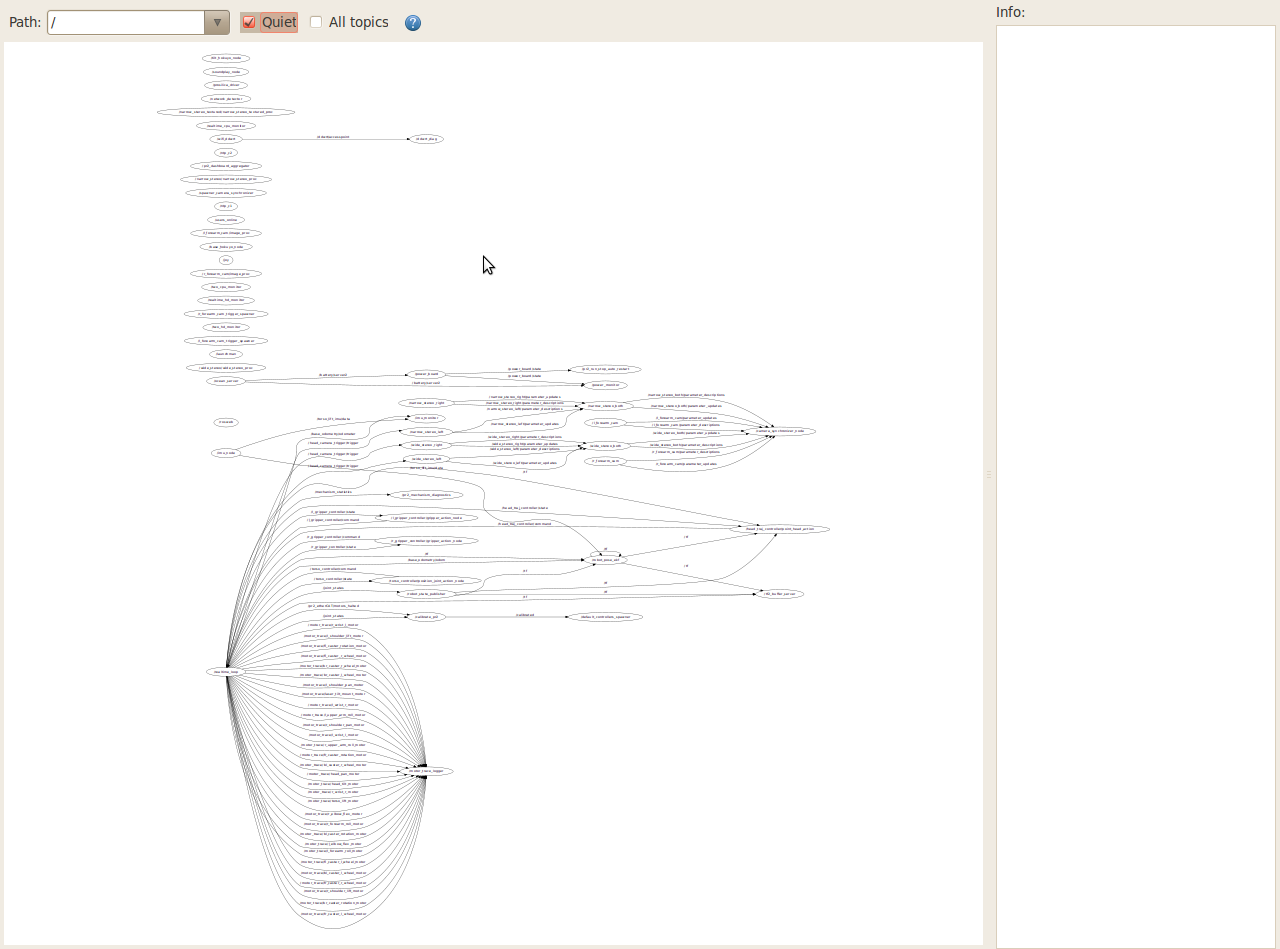
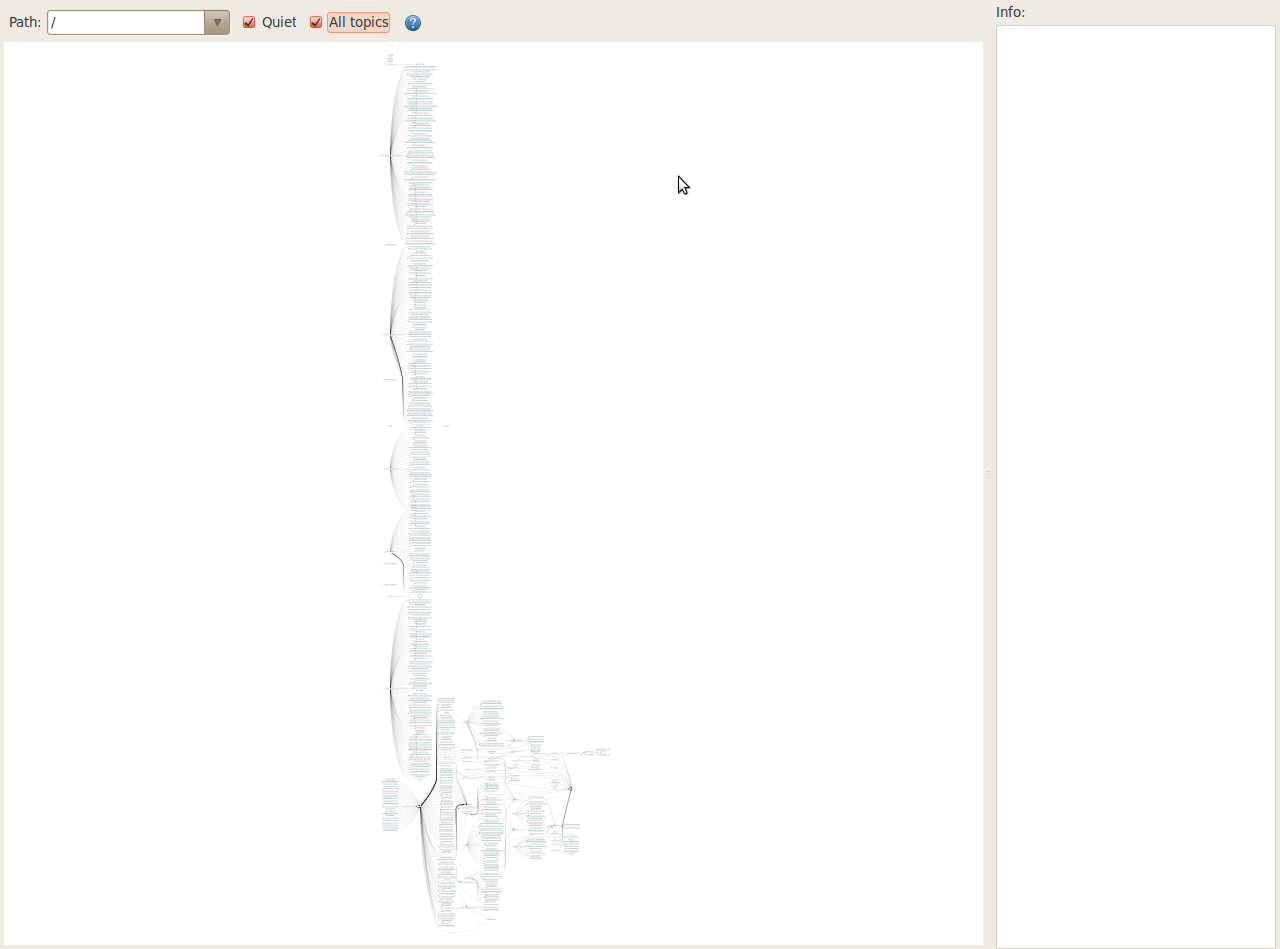
With standard rxgraph, you often get plagued with lots of nodes on your plot that are irrelevant to your task at hand.
{kind=link}
{kind=link}
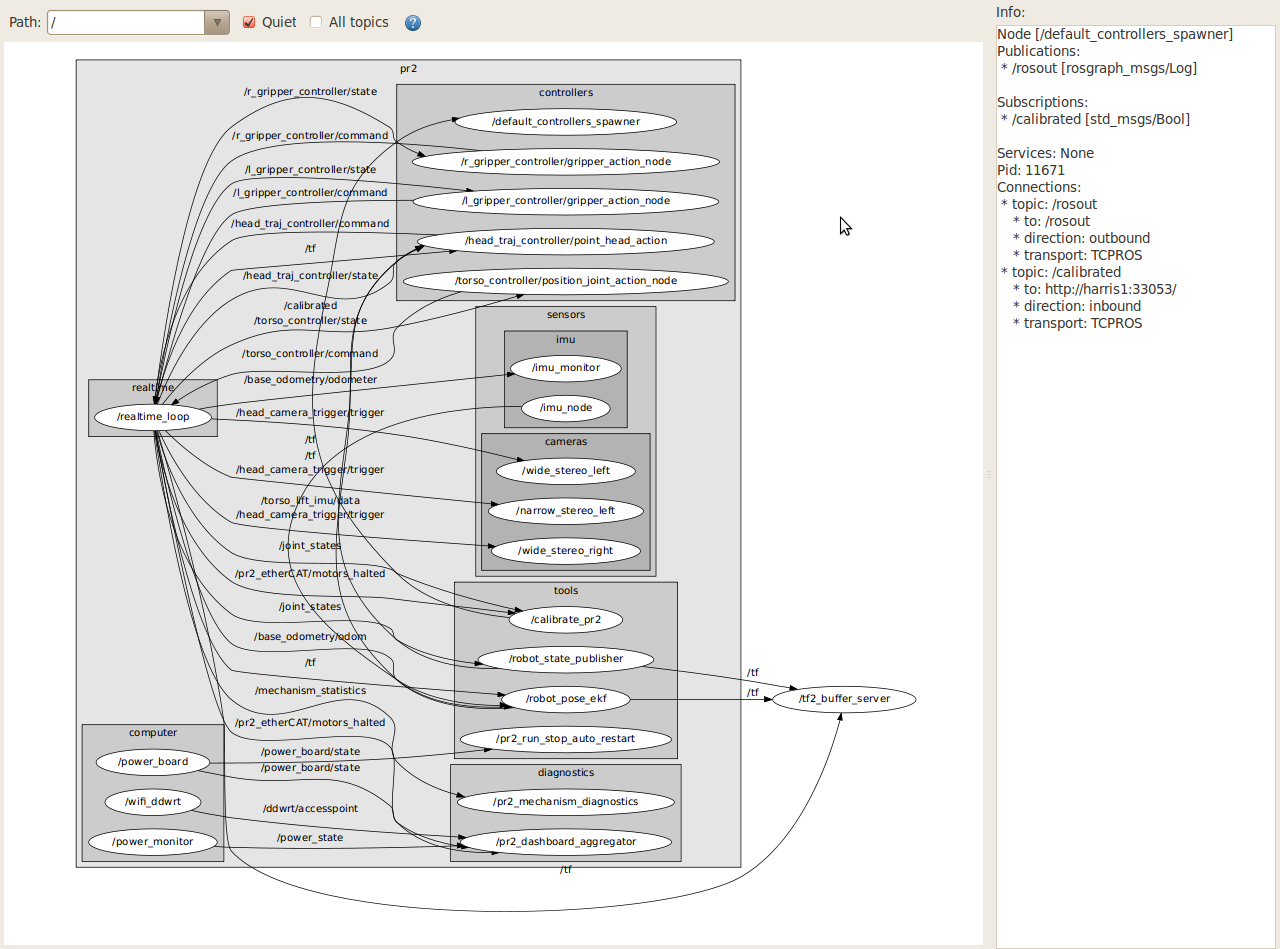
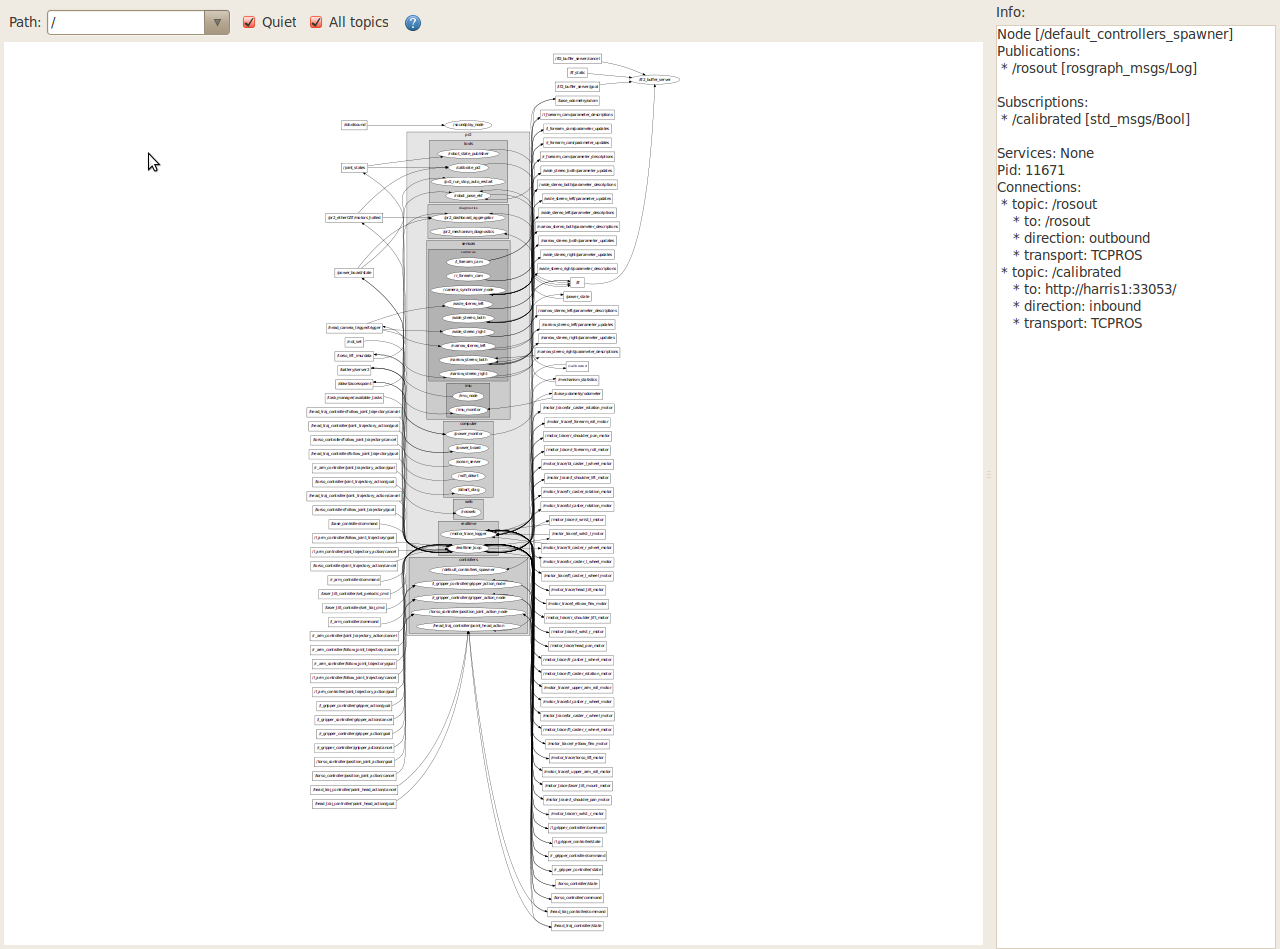
By loading parameters into the parameter server (namespace /rxgraph/config/), rxgraphplus will create subgraphs for the specified components and hide many of the unnecessary components.
{kind=link}
{kind=link}
With Nav Stack parameters
{kind=link}